Erweitern Sie jedes Feather-Board mit präziser Bewegungserfassung mit der ST 9-DoF IMU, einem All-in-One-Sensor-Flügel. Sie ist mit zwei fantastischen Sensoren von ST ausgestattet, die 9 Grad an Bewegungsdaten liefern.
Der ST ISM330DHCX ist ein industrietauglicher Beschleunigungsmesser+Gyroskop 6-DOF IMUs (Inertial Measurement Unit). Dieser IMU-Sensor verfügt über 6 Freiheitsgrade - je 3 Grad für die lineare Beschleunigung und die Winkelgeschwindigkeit mit unterschiedlichen Raten innerhalb eines respektablen Bereichs. Für den Beschleunigungsmesser: ±2/±4/±8/±16 g bei einer Aktualisierungsrate von 1,6 Hz bis 6,7 KHz. Für das Gyroskop: ±125/±250/±500/±1000/±2000/±4000 dps bei 12,5 Hz bis 6,7 KHz. Dies ist einer der wenigen Kreisel, die wir auf Lager haben, die eine Reichweite von 4000 dps haben, normalerweise liegt die Obergrenze bei 2000. Dieser Sensor verfügt über zusätzliche Kalibrier- und Kompensationsschaltungen, die ihm eine hervorragende Leistung in einem breiten Umgebungsbereich von -40 bis +105°C verleihen. Die meisten anderen IMU-Sensoren haben keinen industriellen Temperaturbereich oder weisen bei Temperaturänderungen große Genauigkeitsschwankungen auf. Der Beschleunigungssensor und das Gyroskop befinden sich auf demselben Siliziumchip, wodurch die 6 Messungen besser synchronisiert werden können, als wenn sich die beiden Sensoren auf separaten Chips befinden.
Es gibt auch einige nette Extras, wie z. B. eine integrierte Tap-Erkennung, eine Aktivitätserkennung, einen Schrittzähler und einen programmierbaren Finite-State-Machine-/Machine-Learning-Kern, der eine grundlegende Gestenerkennung durchführen kann.
Es enthält auch ein 3-Achsen-Magnetometer LIS3MDL, das die stärkste magnetische Kraft messen kann, die im Allgemeinen zur Bestimmung des magnetischen Nordens verwendet wird. Die drei Drei-Achsen-Sensoren ergeben insgesamt 9 Freiheitsgrade, und durch die Kombination dieser Daten können Sie das Board ausrichten. Schauen Sie sich diesen Leitfaden an, wie man das macht!
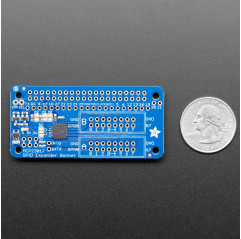
Beide Sensoren sind über den gemeinsamen I2C-Bus verbunden, so dass man sie mit allen Feathers verwenden kann! Außerdem werden die Interrupt-Pins und die Adresswahl-Jumper entfernt, falls Sie mehrere Feathers verwenden wollen oder I2C-Adresskonflikte auftreten. Adafruit hat sowohl Arduino (C/C++) als auch CircuitPython-Bibliotheken zur Verfügung, so dass Sie es mit jedem Feather-Board verwenden können und in weniger als 5 Minuten Daten ablesen können. Vier Befestigungslöcher sorgen für eine sichere Verbindung.
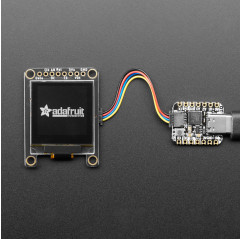
Da das Gerät I2C unterstützt, können Sie es mit zwei Drähten (plus Strom und Masse!) einfach anschließen. Sie haben sogar SparkFun qwiic-kompatible STEMMA QT-Stecker für den I2C-Bus beigelegt, so dass Sie nicht einmal löten müssen! Schließen Sie einfach Ihr Lieblingsmikrofon wie den STM32F405 Feather mit einem Plug-and-Play-Kabel an, um so schnell wie möglich 9 DoF-Daten zu erhalten. Sie können die I2C-Adressen auf der Rückseite mit Hilfe der Lötjumper ändern, um zwei dieser Sensorplatinen an einem Bus zu haben.
Adafruit hat auch Bibliotheken geschrieben, die Ihnen helfen, diese Sensoren in Ihr Arduino/C++ zu integrieren. Diese Bibliothek deckt den Beschleunigungs-/Gyrobereich ab und diese Bibliothek ist für das Magnetometer.
Weitere Informationen wie Schaltpläne, Verdrahtungspläne und Codebibliotheken finden Sie im Lernhandbuch hier.
TECHNISCHE DETAILS
ISM330DHCX Spezifikationen:
Beschleunigungsmesser ±2/±4/±8/±16 g bei 1,6 Hz bis 6,7KHz Aktualisierungsrate
Gyroskop: ±125/±250/±500/±1000/±2000/±4000 dps bei 12,5 Hz bis 6.7 KHz
Kontinuierlicher und Einzelumwandlungsmodus
Erweiterter Schrittzähler, Schrittdetektor und Schrittzähler
Signifikante Bewegungserkennung, Neigungserkennung
Standardunterbrechungen: Freier Fall, Aufwachen, 6D/4D-Orientierung, Klick und Doppelklick
Programmierbarer endlicher Zustandsautomat: Beschleunigungsmesser, Gyroskop und externe Sensoren
Machine Learning Core
I2C-Adresse 0x6A oder 0x6B
LIS3MDL-Spezifikationen:
±4/±8/±12/±16 Gauss wählbare magnetische Vollskalen
Kontinuierlicher und Einzelumwandlungsmodus
16-Bit-Datenausgang
Interrupt-Generator
I2C-Adresse 0x1C oder 0x1E