El sensor de tiempo de vuelo Adafruit VL53L4CX es otro gran sensor de distancia de tiempo de vuelo de ST en la serie de chips VL5, este es genial para largas distancias - llega hasta 6 metros comparado con los 4 metros máximos del VL53L1X.
El sensor contiene una fuente de láser invisible muy pequeña y un sensor de correspondencia. El VL53L4CX puede detectar el "tiempo de vuelo", o el tiempo que la luz ha tardado en rebotar hacia el sensor. Dado que utiliza una fuente de luz muy estrecha, es bueno para determinar la distancia sólo de la superficie que está directamente frente a él. A diferencia de los sonares que hacen rebotar las ondas ultrasónicas, el "cono" de detección es muy estrecho. A diferencia de los sensores de distancia por infrarrojos que tratan de medir la cantidad de luz rebotada, el VL53 es mucho más preciso y no tiene problemas de linealidad ni de "doble imagen", donde no se puede saber si un objeto está muy lejos o muy cerca.
Se trata de una "hermana mayor" del sensor ToF VL53L4CD y puede manejar alrededor de ~1 a 6000mm de distancia de alcance, también tiene cierta capacidad de hacer "detección de objetos múltiples". Básicamente, puede identificar cuando hay más de un objeto a la vista y decirle las dos distancias.
Tenga en cuenta que el controlador Arduino para este chip no es compatible con placas de "memoria pequeña" como el ATmega328 - ¡necesitará un chip SAMD21, SAMD51, ESP, etc. con 50K de memoria flash disponible!
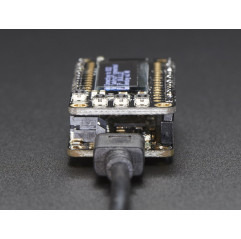
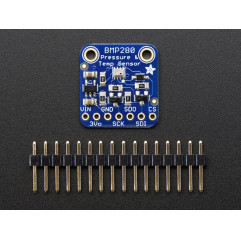
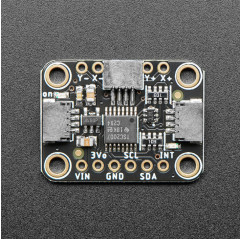
El sensor es pequeño y fácil de usar en cualquier proyecto de robótica o interactivo. Dado que necesita una alimentación de 2,8V y la lógica Adafruit poner el pequeño compañero en una placa breakout con un regulador y el cambio de nivel. Puedes utilizarlo con cualquier microcontrolador de 3-5V de potencia o lógico sin problemas. Funciona muy bien con el nivel lógico de 3.3V de un Feather, o el nivel de 5v de un Arduino Mega, este breakout está listo para trabajar con la mayoría de los microcontroladores comunes o SBCs. y como habla I2C, puedes conectarlo fácilmente con dos cables de datos más la alimentación y la tierra.
Por si fuera poco, también han añadido conectores STEMMA QT compatibles con SparkFun qwiic para el bus I2C, por lo que ni siquiera es necesario soldar. Sólo tienes que conectarlo a tu micro favorito con un cable plug-and-play para obtener datos ToF lo antes posible. Para no tener que soldar, sólo tienes que conectar tu micro favorito, como el STM32F405 Feather, utilizando un cable adaptador STEMMA QT. Los conectores QT de Stemma también permiten utilizar el VL53L4CX con nuestros diversos accesorios asociados. El cable QT no está incluido, pero tenemos una variedad en la tienda
La comunicación con el sensor se realiza a través de I2C con una API escrita por ST, tienen una biblioteca Arduino con un ejemplo para la comunicación aquí.
Detalles técnicos
Especificaciones técnicas:
Medición de distancias rápida y precisa
Tecnología basada en histogramas
Medición de distancias desde 0 mm hasta 6 m
Linealidad de distancias cortas hasta 10 mm
Importante mejora en el rendimiento de la medición de distancias largas en todos los objetivos y niveles de luz
Campo de visión (FoV) de 18°
Capacidad de detección multiobjeto
Los objetivos más allá de los 80 cm de alcance son inmunes a la diafonía del cristal de protección y a las manchas
El VL53L4CX es un módulo en miniatura totalmente integrado
Emisor: láser invisible de 940 nm (VCSEL) y su controlador analógico
Microcontrolador de baja potencia que ejecuta un firmware digital avanzado
Tamaño: 4.4 x 2,4 x 1 mm
Compatible pin a pin con VL53L0X, VL53L1X, VL53L1CB, VL53L3CX y VL53L4CD
Documentación de ST para el sensor VL53L4CX